| Forum eSterownik.pl Moje boje - czyli własny sterownik Subskrybuj | ||||
| Pierwsza stronaPoprzednia strona7 / 40Następna stronaOstatnia strona | ||||
|
|
||||
|
janusz
|
mark3k napisał » 2015-10-14 21:23 I Sam współczynnik może nie wystarczyć do utrzymania stabilnej temp na kotle. Wydaje mi się wystarczy sam współczynnik tylko trzeba poćwiczyć z ustawieniami przykład z dnia dzisiejszego 1 odstawienie 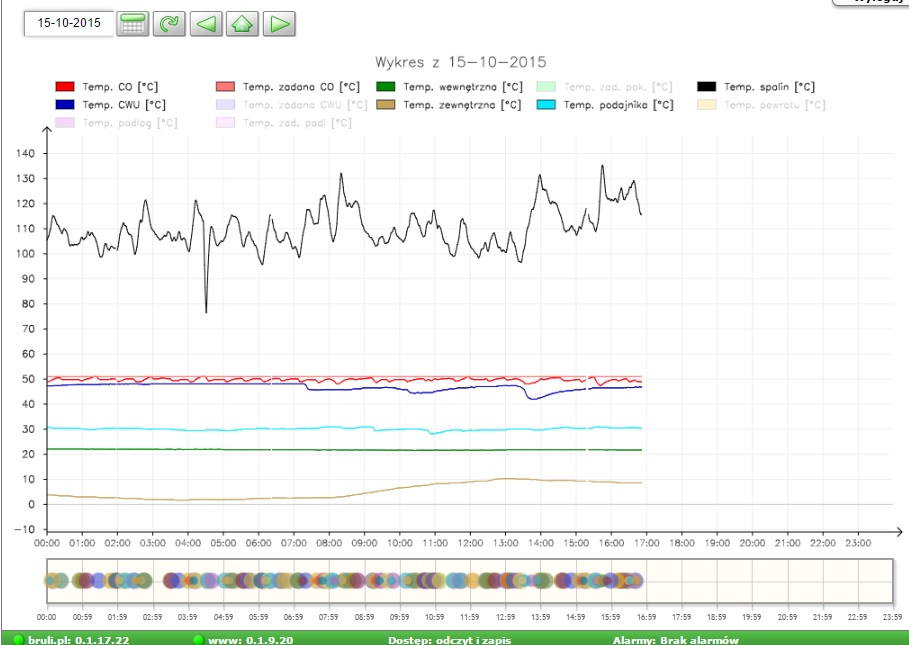 |
|||
|
|
||||
mark3k

|
OK. Potestuję, gdy uzi18 się spręży i oczywiście napiszę co i jak.
U mnie dodatkowo na zmiany temp do grzejników i pośrednio tempCO ma wpływ regulacja zaworu 4D z siłownikiem i sterem pogodowym. |
|||
|
|
||||
Stan
|
No ja też jestem gotowy na testy
")
|
|||
|
|
||||
uzi18

|
Najwczesniej w sobote cos rusze ... jestem jeszcze na szkoleniu w Gdansku, ...
dodane 2015-10-17 00:56Dodalem, nowe metody do sterownik.py ... sprawdzcie czy dzialaja ... nie mam ecoal... setRetRecznyPodawanie(ile) setRetRecznyPostoj(ile) setRetRecznyDmuchawa(ile) sprawdzenie trybu w jakim jest sterownik: getTypKotla() przyklad uzycia ustawiamy postoj na 55: $ python Python 2.7.10 (default, Sep 11 2015, 22:38:57) [GCC 4.9.3 20150627 (release)] on linux2 Type "help", "copyright", "credits" or "license" for more information. >>> from sterownik import * >>> c = sterownik("192.168.2.2", "admin","admin") >>> c.setRetRecznyPostoj(55) >>> c.getTypKotla() RETORTOWY-GRUPOWY dodane 2015-10-17 01:06PS. Poprawilem tez blad sprawdzania statusu polaczeniu ze sterownikiem, polaczenie powinno byc teraz stabilniejsze, na wszystkich skryptach. Polecam aktualizacje do najnowszej wersji z github |
|||
|
|
||||
|
Stan
|
Czyli rozumiem że idea działania takiej korekcji ręcznego polega na tym że mamy ustawiny tryb ręczny w jakiś proporcjach pracy i przerwy i od czasu do czasu ( zależy jak tam sobie wymyślimy algorytm korekcji) zmieniamy podawanie (nawiew) ?
Pytam bo nie widze w tym ustawiania czasów przerw. dodane 2015-10-17 14:09Chmm, nasunąl mi się pewien pomysł, jak to wykorzystać, ale muszę to jeszcze przemyśleć. |
|||
|
|
||||
|
uzi18
|
setRetRecznyPostoj(ile) to wlasnie przerwa ... moge zmienic nazwe ...
Na poczatek, chcialbym napisac algorytm Janusza, zobaczymy co z tego wyjdzie, Stan jak nazwac ten skrypt? Janusz mial napisane retortowy własny ale moze: retortowy-j,retortowy-proporcjonalny. Skryptu jeszcze nie ma dopiero sie za niego biore, ... Aby mozna bylo go napisac musialem dopisac kilka rzeczy do sterownik.py. Powinien dzialac tak,ze w trybie retortowym-recznym startuje od pewnych ustawien podawanie,postoj,dmuchanie, zmienia je proporcjonalnie do roznicy zadanej a t.CO. |
|||
|
|
||||
|
Stan
|
Retortowy proporcjonalny będzie ok, przydało by się też zaznaczyć kto jest pomysłodawcą 😃.
Ja mam pewien pomysł na połączenie tego z zamysłem Mark3k. Ale pomysł dopiero mi się wykluwa w głowie więc za wcześnie aby o nim mówić. |
|||
|
|
||||
|
uzi18
|
OK, panowie czekam na testy plik nazywa sie retortowy-P.py i wymaga najnowszej wersji pliku sterownik.py
dodane 2015-10-17 20:21Aktualne parametry pracujace na moim sprzecie: zadana_co = 65 korekcja_podawania= 1.0 korekcja_postoju = -6.0 korekcja_dmuchania= 0.5 start_podawanie= 6 start_postoj =100 start_dmuchawa = 38 czas_cyklu = 60 |
|||
|
|
||||
|
Stan
|
Ok, jutro potestuję.
|
|||
|
|
||||
|
uzi18
|
dodalem nowe parametry dla mark3k:
rozped_podawanie= 20 rozped_postoj = 60 rozped_dmuchawa = 45 Te parametry uruchomione sa jako 1, pozniej juz sa brane z algorytmu, mozna je sobie ustawic odpowiednio jak zmienne start_x jesli ktos nie potrzebuje tej funkcji. dodane 2015-10-17 21:04Stan mozesz wydzielic posty o retortowy-P do oddzielnego watku? dodane 2015-10-17 21:33Dodalem kontrole zmiany parametrow - teraz wysylamy tylko gdy musimy ... |
|||
|
|
||||
|
Stan
|
Niestety nie mogę wydzielić tych postów, wygląda na to że po zmianie forum nie przeniesiono mi uprawnień moderatorskich.
|
|||
|
|
||||
|
uzi18
|
Aktualnie w repozytorium jest wersja dzialajaca poprawnie, zgodnie z Janusza
wytycznymi i kilkoma modyfikacjami, ktore pozwalaja na wieksze pole do popisu. 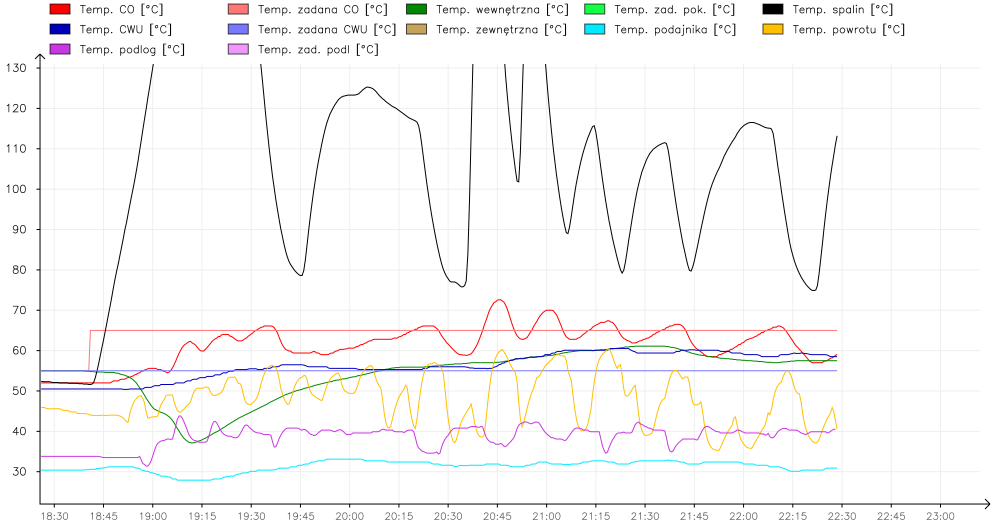 Wykres wyglada jak wyglada, bo w miedzyczasie dodawalem kod i sprawdzalem rozne parametry |
|||
|
|
||||
|
Stan
|
No dobra , jutro się pobawię i zobaczę co z tego można wycisnąć
|
|||
|
|
||||
|
uzi18
|
juz widze ze zwiekszanie podawania od delty slabo sie u mnie sprawdza ...
czyli cos bede musial rozdzielic pewnie wspolczynniki dla wzrastajacej delty i malejacej |
|||
|
|
||||
|
mark3k
|
Właśnie to próbowałem wyjaśnić. W tym układzie pracy jest to nadal układ nadążny, a potrzebujemy układu działającego z wyprzedzeniem.
|
|||
|
|
||||
|
uzi18
|
mark3k: spokojnie, do tego dojdziemy lada chwila, ... chyba ze masz jakies konkretne propozycje?
Widziales skrypt? |
|||
|
|
||||
|
mark3k
|
Widziałem i analizowałem.
Obserwowałem pracę Twojego kociołka na nowym algorytmie. Dlatego wysnułem taki wniosek. |
|||
|
|
||||
|
uzi18
|
wlasnie - przyznaje sie bez bicia - dodalem w obsludze polaczenia na moim sterowniczku test crc w pakietach
") Gdyby nie Janusz to pewnie jeszcze dlugo bym sie bez tego obyl ... dodane 2015-11-06 09:37Rozwiazalem problem z programowaniem arduino bezposrednio z RPi, czyli innymi slowy mozna sterownik teraz programowac bez wychodzenia do kotlowni z laptopem ... dodane 2015-11-06 09:52Po wylaczeniu hasla do logowania na RPi, praca stala sie conajmniej przyjemna ... |
|||
|
|
||||
|
mark3k
|
No i na to czekałem.
Także chyba wył\ączę konieczność wpisywania hasła za każdym razem. Jest to co prawda bezpieczne, ale nader wkórw..... . |
|||
|
|
||||
|
uzi18
|
mark3k: włączyłem uwierzytelnianie na bazie kluczy ... dlatego nie muszę już go pisać, w putty tez się da to zrobić ...
(hint: putty-gen) dodane 2015-11-06 18:20zainteresuj sie tez programem "screen", doinstaluj pakiet na RPi i w nim uruchamiaj skrypty ... pozwala miec kilka wirtualnych terminali uruchomionych i przelaczac sie miedzy nimi, nawet jesli polaczenie Ci siadzie to mozesz sie na nie znow polaczyc i kontynuowac prace |
|||
| Pierwsza stronaPoprzednia strona7 / 40Następna stronaOstatnia strona | ||||