Profil użytkownika
| posty użytkownika | ||||
| Pierwsza stronaPoprzednia strona27 / 39Następna stronaOstatnia strona | ||||
|
|
||||
uzi18

|
za to fajnie wymysliles z tym monitorowaniem cwu, ale nalezy tylko reagowac jak pompka cwu dziala inaczej moze byc kuku
|
|||
|
|
||||
|
uzi18
|
janusz: u mnie tez CWU wysysa t.CO i nie moge sobie z tym poradzic ...
VERB ma to CWU na grawitacji najpewniej dlatego sytuacja nie ma az tak wielkiego wplywu. dodane 2015-10-18 21:58VERB: ok, poczekam, chociaz szkoda np. ze Twoje poprzednie pomysly/skrypty tez zaginely gdzies w czelusciach internetu ... |
|||
|
|
||||
|
uzi18
|
VERB jesli chcesz to dopisze do tej biblioteki dla RS-a od DarkaB to co trzeba,
w sumie lepiej jakby wszystko bylo w jednym repozytorium. Moze z czasem je ujednolice w koncu ze bedzie sie samo wybierac czy ma isc przez RS czy Ethernet, wtedy bedzie jedna uniwersalna biblioteka ... |
|||
|
|
||||
|
uzi18
|
Wydaje mi sie, ze to jeszcze nie kłótnia, ale juz kilka postow nie na temat ...
|
|||
|
|
||||
|
uzi18
|
No dobra panowie, tyle o jakims konkursie, ktorego nikt nie potwierdzil, byla tylko wzmianka a to nic konkretnego.
Chcialbym sie w koncu dowiedziec jak widzicie prace udostepnionego algorytmu. PS. Gdyby tak ES zrobilo konkurs na algorytm to przynajmniej byloby ciekawiej ") PS2. Zaraz jade do pracy wiec marne szanse abym cos dopisal/poprawil. dodane 2015-10-18 18:10bobas: nie znamy kryteriow wiec mozna sobie myslec co sie chce ") |
|||
|
|
||||
|
uzi18
|
MariuszK: niestety ale to nie jest w temacie ani TRK ani mojego sterownika wiec zalozylem nowy temat
ten algorytm jest na podstawie opracowanej przez janusza |
|||
|
|
||||
|
uzi18
|
Panowie czekam na testy plik nazywa sie retortowy-P.py i wymaga najnowszej wersji pliku sterownik.py
dodane 2015-10-17 20:21Aktualne parametry pracujace na moim sprzecie: zadana_co = 65 korekcja_podawania= 1.0 korekcja_postoju = -6.0 korekcja_dmuchania= 0.5 start_podawanie= 6 start_postoj =100 start_dmuchawa = 38 czas_cyklu = 60 |
|||
|
|
||||
|
uzi18
|
mark3k: spokojnie, do tego dojdziemy lada chwila, ... chyba ze masz jakies konkretne propozycje?
Widziales skrypt? |
|||
|
|
||||
|
uzi18
|
juz widze ze zwiekszanie podawania od delty slabo sie u mnie sprawdza ...
czyli cos bede musial rozdzielic pewnie wspolczynniki dla wzrastajacej delty i malejacej |
|||
|
|
||||
|
uzi18
|
Aktualnie w repozytorium jest wersja dzialajaca poprawnie, zgodnie z Janusza
wytycznymi i kilkoma modyfikacjami, ktore pozwalaja na wieksze pole do popisu. 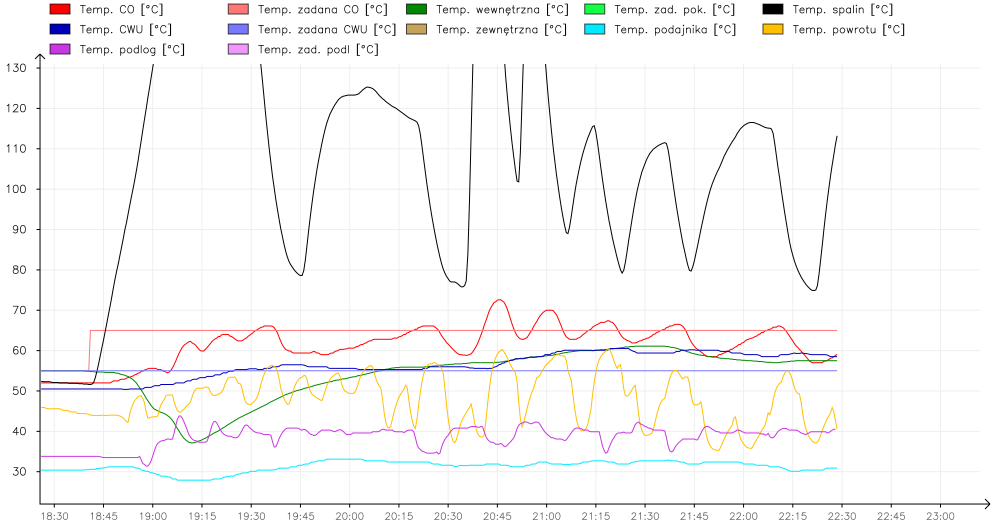 Wykres wyglada jak wyglada, bo w miedzyczasie dodawalem kod i sprawdzalem rozne parametry |
|||
|
|
||||
|
uzi18
|
dodalem nowe parametry dla mark3k:
rozped_podawanie= 20 rozped_postoj = 60 rozped_dmuchawa = 45 Te parametry uruchomione sa jako 1, pozniej juz sa brane z algorytmu, mozna je sobie ustawic odpowiednio jak zmienne start_x jesli ktos nie potrzebuje tej funkcji. dodane 2015-10-17 21:04Stan mozesz wydzielic posty o retortowy-P do oddzielnego watku? dodane 2015-10-17 21:33Dodalem kontrole zmiany parametrow - teraz wysylamy tylko gdy musimy ... |
|||
|
|
||||
|
uzi18
|
OK, panowie czekam na testy plik nazywa sie retortowy-P.py i wymaga najnowszej wersji pliku sterownik.py
dodane 2015-10-17 20:21Aktualne parametry pracujace na moim sprzecie: zadana_co = 65 korekcja_podawania= 1.0 korekcja_postoju = -6.0 korekcja_dmuchania= 0.5 start_podawanie= 6 start_postoj =100 start_dmuchawa = 38 czas_cyklu = 60 |
|||
|
|
||||
|
uzi18
|
Poprawilem blad sprawdzania statusu polaczeniu ze sterownikiem,
polaczenie powinno byc teraz stabilniejsze, na wszystkich skryptach. Polecam aktualizacje do najnowszej wersji z github |
|||
|
|
||||
|
uzi18
|
setRetRecznyPostoj(ile) to wlasnie przerwa ... moge zmienic nazwe ...
Na poczatek, chcialbym napisac algorytm Janusza, zobaczymy co z tego wyjdzie, Stan jak nazwac ten skrypt? Janusz mial napisane retortowy własny ale moze: retortowy-j,retortowy-proporcjonalny. Skryptu jeszcze nie ma dopiero sie za niego biore, ... Aby mozna bylo go napisac musialem dopisac kilka rzeczy do sterownik.py. Powinien dzialac tak,ze w trybie retortowym-recznym startuje od pewnych ustawien podawanie,postoj,dmuchanie, zmienia je proporcjonalnie do roznicy zadanej a t.CO. |
|||
|
|
||||
|
uzi18
|
Najwczesniej w sobote cos rusze ... jestem jeszcze na szkoleniu w Gdansku, ...
dodane 2015-10-17 00:56Dodalem, nowe metody do sterownik.py ... sprawdzcie czy dzialaja ... nie mam ecoal... setRetRecznyPodawanie(ile) setRetRecznyPostoj(ile) setRetRecznyDmuchawa(ile) sprawdzenie trybu w jakim jest sterownik: getTypKotla() przyklad uzycia ustawiamy postoj na 55: $ python Python 2.7.10 (default, Sep 11 2015, 22:38:57) [GCC 4.9.3 20150627 (release)] on linux2 Type "help", "copyright", "credits" or "license" for more information. >>> from sterownik import * >>> c = sterownik("192.168.2.2", "admin","admin") >>> c.setRetRecznyPostoj(55) >>> c.getTypKotla() RETORTOWY-GRUPOWY dodane 2015-10-17 01:06PS. Poprawilem tez blad sprawdzania statusu polaczeniu ze sterownikiem, polaczenie powinno byc teraz stabilniejsze, na wszystkich skryptach. Polecam aktualizacje do najnowszej wersji z github |
|||
|
|
||||
|
uzi18
|
tak uprzedze tylko, nie rezygnuje z rozwijania mojego sterownika, nadal bedzie rozwijany
|
|||
|
|
||||
|
uzi18
|
TRK tez jest udostepnione za darmo, wklad i idea Stan-a ja go troche rozwinalem i przebudowalem ale nic to tam mozna prawie kazdy algorytm spalania osiagnac.
mysle ze na poczatek kilka oddzielnych algorytmow zrobie jako oddzielne programy, pozniej to moze polacze janusz: jak zrobie grupowy automat to potestujesz? |
|||
|
|
||||
|
uzi18
|
mysle ze dodam wspolczynniki dla podawania i dmuchawy, kazdy sobie podreguluje ...
dodane 2015-10-14 19:19janusz: moze jestem jeszcze mlody ... chcialbym tez zerwac w koncu z tymi rozwiazaniami tylko dla siebie na tym forum |
|||
|
|
||||
|
uzi18
|
Mimo wszystko pozostawie wewnatrz skryptu jakas informacje o Tobie jako pomyslodawcy skryptu
|
|||
|
|
||||
|
uzi18
|
Hmm, czyli podajesz inna zadana niz na sterowniku?
minimalne podawanie jak dobierasz? Ok, czyli wpierw musze zaktualizowac o kilka nowych metod sterownik.py i napisac nowy skrypt. Z tego co widac jest to regulator proporcjonalny. janusz jako pomyslodawca, jakos nazwales to rozwiazanie? (chacialbym jakos nazwac ten skrypt) |
|||
| Pierwsza stronaPoprzednia strona27 / 39Następna stronaOstatnia strona | ||||